Project information
- Category: Undergrad Research Project
- Affiliation: Tribhuvan University (TU)
- Date: 2019
- Project URL: https://oarepo.org/index.php/oa/article/view/760
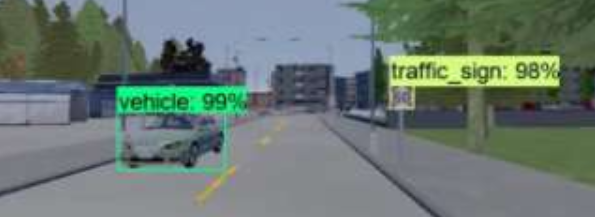
Prediction of Vehicle's Movement using CNN
Abstract
This paper is concerned with the development of a self-driving vehicle model that can navigate its way around the virtual simulator from source to destination by detecting lanes, objects and making predictions for vehicle movement. The source and destination for the vehicle is provided as input at first and a shortest route is calculated using A* search algorithm. Then, the images captured from the live stream of the simulator and other vehicle measurements are passed into the pipeline which is responsible for detecting road lanes, objects in the image and finally making accurate predictions for driving the vehicle. Road lanes are detected using Canny Edge Detection and Hough Transform. Faster R-CNN algorithm is used for object detection. Convolutional Neural Network (CNN) is trained and used to predict the movement of the vehicle. The project is shown in Carla simulator.